
Underwater robots will help BIOPOLE scientists understand how changing river runoff and melting ice will impact nutrient cycling in the high latitudes and beyond. But these robots need to be tested before they are sent off into the wild…
Many of the essential nutrients that are needed by marine algae in the polar regions are supplied by freshwaters, including glacial melt, river waters, and melting permafrost. As part of BIOPOLE, we’re going to track where these freshwaters flow when they hit the ocean, and what happens to all the nutrients that they supply. One set of tools that we have available to us to track these waters is autonomous vehicles – marine robots full of sensors that can measure the temperature, saltiness, and other properties of the water at very high resolution in space and time, independently of a boat. Also, critically, these robots can reach places that boats can’t reach safely (or at all), such as near icebergs and glaciers, and work with a much lower carbon footprint.
The BAS Polar Oceans team have recently got new additions to their robotics fleet, including a new rechargeable Slocum G3 glider and mini autonomous vehicles called ecoSUBs. Before the new kit is deployed in the Arctic and Antarctic as part of BIOPOLE, everything needed to be tested – somewhere a lot closer to home!
So, at the end of September, members of the Polar Oceans Team headed up to the Scottish Association for Marine Science (SAMS) in Oban to do just that.
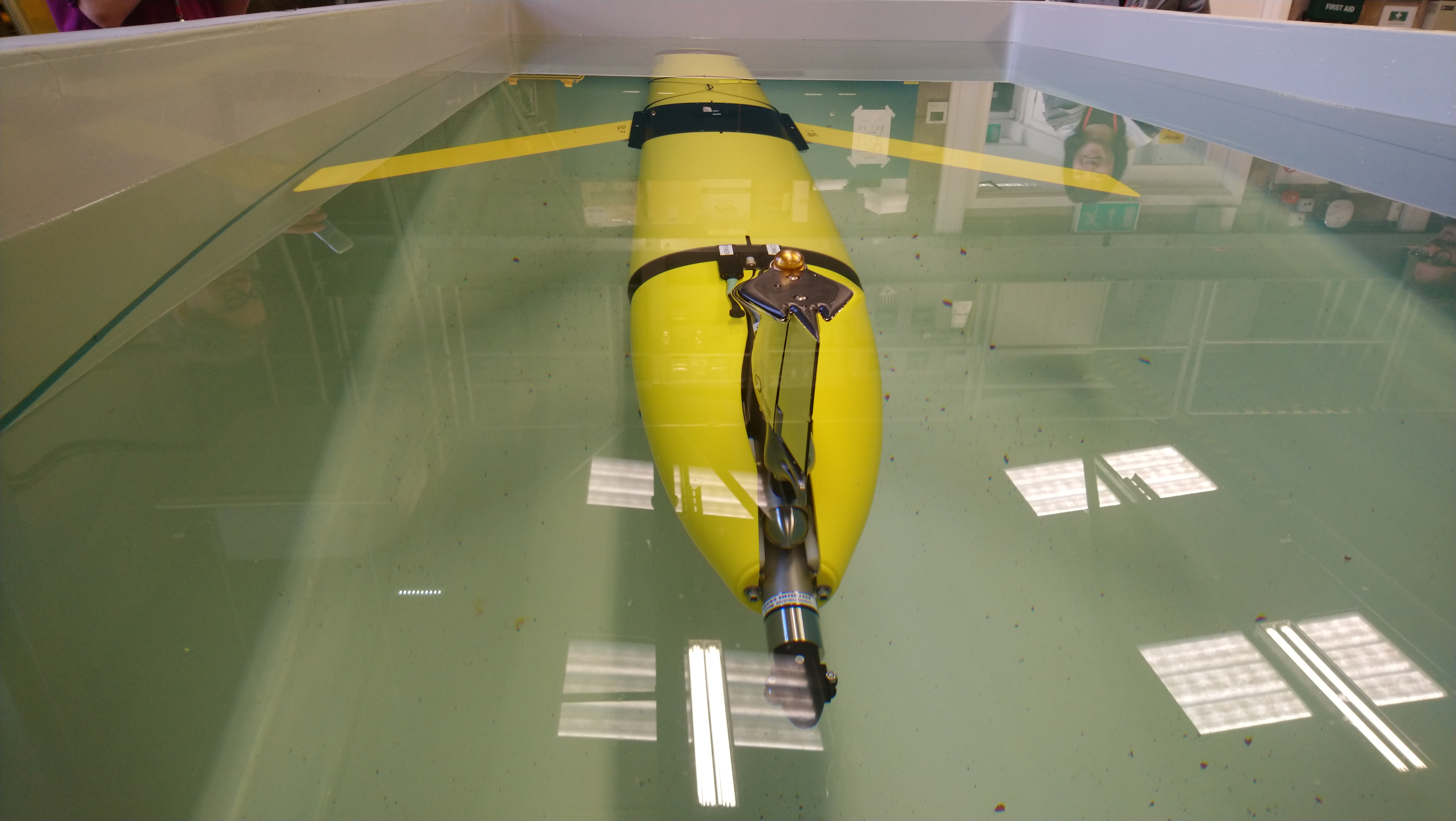
The first week involved a lot of work in the Scottish Marine Robotics Facility getting everything ready in the laboratory. The glider and ecoSUBs first need to be tested for buoyancy, so that they float in the water under the right conditions. This is done by adding or taking away weights within the frame of the vehicles, and then testing them in a large tank of seawater. Then the communications need to be tested, to make sure that the robots are receiving and transmitting data via satellite to and from the team’s computers and servers in Cambridge.


In the second week, it was time to let the robots out into the wild (and the early October driving rain). Thanks to friends in SAMS, the team were able to take the glider out into a nearby sea loch, deep enough to test deploying the vehicle and to run a “mission”, and into a shallower bay to test an ecoSUB. Except for a few little adjustments to make (as is always the case for a ‘dress rehearsal’) the robots worked well – and, most importantly, all were recovered at the end!


Next step: it’s back to the lab for the glider and ecoSUB for more tweaking and then, eventually, out into the Arctic and Antarctic in 2023-2024.
The author of the blog – Kate Hendry (British Antarctic Survey)